在自動(dòng)駕駛技術(shù)日新月異的今天,一項(xiàng)突破性進(jìn)展正將我們從輔助駕駛的“現(xiàn)在”加速推向全無(wú)人駕駛的“未來(lái)”。全球首個(gè)融合多視圖感知、未來(lái)預(yù)測(cè)與實(shí)時(shí)規(guī)劃于一體的自動(dòng)駕駛世界模型正式亮相,標(biāo)志著自動(dòng)化控制系統(tǒng)開(kāi)發(fā)與集成邁入了全新的智能階段。這一模型的誕生,不僅是技術(shù)上的重大跨越,更是重構(gòu)未來(lái)交通生態(tài)的核心引擎。
傳統(tǒng)自動(dòng)駕駛系統(tǒng)往往依賴(lài)于模塊化設(shè)計(jì):感知模塊識(shí)別環(huán)境,預(yù)測(cè)模塊推斷他車(chē)行人意圖,規(guī)劃模塊計(jì)算自身路徑,最后交由控制系統(tǒng)執(zhí)行。這種串聯(lián)式架構(gòu)在應(yīng)對(duì)極端復(fù)雜、動(dòng)態(tài)變化的真實(shí)世界時(shí),常面臨信息滯后、決策割裂的挑戰(zhàn)。而新提出的“多視圖預(yù)測(cè)-規(guī)劃世界模型”則從根本上改變了這一范式。它如同為自動(dòng)駕駛汽車(chē)裝上了一顆能夠進(jìn)行“情景推演”和“因果思考”的大腦。
核心突破:從“看到”到“預(yù)見(jiàn)”與“規(guī)劃”的統(tǒng)一
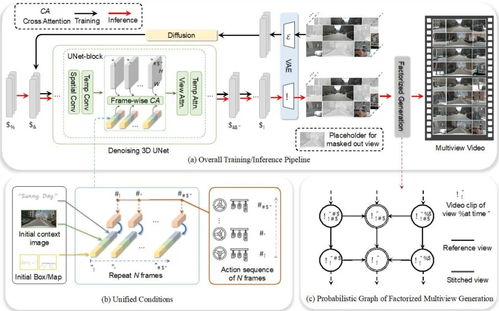
該模型的核心創(chuàng)新在于其“多視圖預(yù)測(cè)”與“端到端規(guī)劃”的深度融合。
- 多視圖感知與重建:模型不再單一依賴(lài)攝像頭或激光雷達(dá),而是深度融合車(chē)輛周身多傳感器(如多個(gè)攝像頭、激光雷達(dá)、毫米波雷達(dá))的數(shù)據(jù),實(shí)時(shí)構(gòu)建一個(gè)包含幾何、語(yǔ)義、動(dòng)態(tài)物體信息的稠密3D場(chǎng)景表征。這個(gè)統(tǒng)一的“世界視圖”為后續(xù)步驟提供了堅(jiān)實(shí)的基礎(chǔ)。
- 概率化未來(lái)推演:這是模型最關(guān)鍵的“預(yù)測(cè)”部分。基于當(dāng)前及歷史的世界狀態(tài),模型能夠以概率形式,自主推演未來(lái)數(shù)秒內(nèi)場(chǎng)景中所有動(dòng)態(tài)元素(其他車(chē)輛、行人、騎行者等)可能發(fā)生的多種演變軌跡。它不僅能預(yù)測(cè)“最可能”的還能理解各種“可能但不確定”的未來(lái)分支,從而量化感知不確定性帶來(lái)的風(fēng)險(xiǎn)。
- 基于模型的實(shí)時(shí)規(guī)劃:傳統(tǒng)的規(guī)劃器像是在一張靜態(tài)地圖上找路。而新模型則將自身對(duì)未來(lái)的推演直接作為規(guī)劃空間。規(guī)劃模塊在由預(yù)測(cè)模塊生成的多種未來(lái)“情景劇本”中進(jìn)行搜索和評(píng)估,直接輸出既安全(避免所有不良未來(lái)分支)、又舒適高效的最優(yōu)控制序列(如轉(zhuǎn)向、加速、制動(dòng))。這種“規(guī)劃-預(yù)測(cè)”閉環(huán),使得車(chē)輛能夠提前為潛在風(fēng)險(xiǎn)做出預(yù)案,實(shí)現(xiàn)類(lèi)似人類(lèi)的防御性駕駛。
對(duì)自動(dòng)化控制系統(tǒng)開(kāi)發(fā)與集成的深遠(yuǎn)影響
這一世界模型的出現(xiàn),為整個(gè)自動(dòng)化控制系統(tǒng)的開(kāi)發(fā)與集成帶來(lái)了范式轉(zhuǎn)變:
- 開(kāi)發(fā)流程的變革:從傳統(tǒng)的“感知-預(yù)測(cè)-規(guī)劃-控制”分模塊獨(dú)立開(kāi)發(fā)與調(diào)試,轉(zhuǎn)向以“世界模型”為核心的統(tǒng)一、聯(lián)合優(yōu)化開(kāi)發(fā)。這要求算法、軟件與硬件(尤其是高性能計(jì)算平臺(tái))的深度協(xié)同設(shè)計(jì),也催生了新的仿真測(cè)試需求——需要在海量、長(zhǎng)尾的復(fù)雜交互場(chǎng)景中驗(yàn)證模型的推演與決策能力。
- 系統(tǒng)集成的簡(jiǎn)化與強(qiáng)化:模型提供了一個(gè)統(tǒng)一的、高層次的場(chǎng)景理解與決策接口,有望簡(jiǎn)化下游控制系統(tǒng)的集成難度。控制系統(tǒng)的任務(wù)從處理大量原始感知數(shù)據(jù)并應(yīng)對(duì)突發(fā)狀況,轉(zhuǎn)變?yōu)楦珳?zhǔn)地執(zhí)行一個(gè)經(jīng)過(guò)深思熟慮的、已考慮未來(lái)不確定性的規(guī)劃指令,從而提升了整個(gè)系統(tǒng)的穩(wěn)定性和可靠性。
- 安全邊界的重新定義:通過(guò)概率化推演,系統(tǒng)能夠主動(dòng)識(shí)別并量化“邊緣案例”的風(fēng)險(xiǎn),使安全設(shè)計(jì)從“應(yīng)對(duì)已發(fā)生事件”前移到“預(yù)防可能發(fā)生事件”。這為構(gòu)建可證明安全性的自動(dòng)駕駛系統(tǒng)提供了新的理論和技術(shù)路徑。
- 推動(dòng)車(chē)路云協(xié)同:一個(gè)強(qiáng)大的車(chē)載世界模型,可以作為車(chē)路云一體化系統(tǒng)中的智能節(jié)點(diǎn)。它不僅能處理本地信息,未來(lái)還能更好地融合來(lái)自路側(cè)設(shè)施(如智慧路口)和其他車(chē)輛(V2X通信)的預(yù)測(cè)與規(guī)劃信息,實(shí)現(xiàn)群體智能和全局交通優(yōu)化。
挑戰(zhàn)與未來(lái)展望
盡管前景廣闊,這一世界模型走向大規(guī)模應(yīng)用仍面臨挑戰(zhàn):對(duì)計(jì)算資源的巨大需求、長(zhǎng)尾場(chǎng)景下推演準(zhǔn)確性的保證、以及如何確保模型決策的可解釋性與可監(jiān)管性。
毋庸置疑的是,“多視圖預(yù)測(cè)-規(guī)劃自動(dòng)駕駛世界模型”為我們清晰地勾勒出一條駛向未來(lái)的技術(shù)路徑。它將自動(dòng)駕駛的核心從“反應(yīng)式的自動(dòng)化”推向“預(yù)見(jiàn)性的自主智能”,不僅是單車(chē)智能的躍升,更是構(gòu)建高效、安全、和諧未來(lái)交通網(wǎng)絡(luò)的關(guān)鍵基石。隨著自動(dòng)化控制系統(tǒng)圍繞此類(lèi)先進(jìn)模型不斷深化開(kāi)發(fā)與集成,人類(lèi)距離那個(gè)汽車(chē)真正擁有“世界常識(shí)”并自主、可靠穿梭于街巷的又近了一大步。